Multiprocessor Image-Based Control Systems: Model-Driven Optimization
Saijd Mohamed defended his PhD thesis at the department of Electrical Engineering on December 20th.
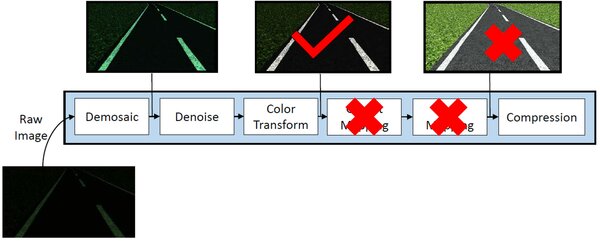
Over the last years, cameras have become an integral component of modern cyber-physical systems due to their versatility, relatively low cost and multi-functionality. Image-processing algorithms are compute-intensive and result in an inherent relatively long sensing delay. For his PhD research, Saijd Mohamed investigated techniques to cope with this.

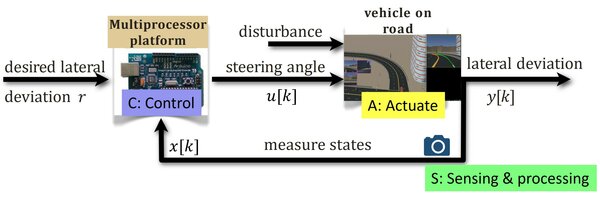
Camera sensors form the backbone of modern applications like advanced driver assistance systems (ADASs), visual servoing, telerobotics, autonomous systems, electron microscopes, surveillance and augmented reality. Image-based control (IBC) systems refer to a class of data-intensive feedback control systems whose feedback is provided by the camera sensor(s). IBC systems have become popular with the advent of efficient image-processing algorithms, low-cost complementary metal–oxide semiconductor (CMOS) cameras with high resolution and embedded multiprocessor computing platforms with high performance. The combination of the camera sensor(s) and image-processing algorithms can detect a rich set of features in an image. These features help to compute the states of the IBC system, such as relative position, distance, or depth, and support tracking of the object-of-interest. Modern industrial compute platforms offer high performance by allowing parallel and pipelined execution of tasks on their multiprocessors.
Optimization IBC system performance
The challenge, however, is that the image-processing algorithms are compute-intensive and result in an inherent relatively long sensing delay. State-of-the-art design methods do not fully exploit the IBC system characteristics and advantages of the multiprocessor platforms for optimising the sensing delay. The sensing delay of an IBC system is moreover variable with a significant degree of variation between the best-case and worst-case delay due to application-specific image-processing workload variations and the impact of platform resources. A long variable sensing delay degrades system performance and stability. A tight predictable sensing delay is required to optimize the IBC system performance and to guarantee the stability of the IBC system. Analytical computation of sensing delay is often pessimistic due to image-dependent workload variations or challenging platform timing analysis. Therefore, this thesis explores techniques to cope with the long variable sensing delay by considering application-specific IBC system characteristics and exploiting the benefits of the multiprocessor platforms. Effectively handling the long variable sensing delay helps to optimize IBC system performance while guaranteeing IBC system stability.
Title of PhD thesis: Multiprocessor Image-Based Control Systems: Model-Driven Optimisation. Promotor: Twan Basten. Copromotor: Dip Goswami