Robotic Construction Planning
Robotics in construction is a rapidly growing field, as the industry looks for ways to improve efficiency, reduce costs, and increase safety on construction sites. One area of focus is the use of semi-autonomous robots for tasks such as assembly, which can be partly performed on-site. These robots are equipped with sensors and algorithms that allow them to navigate around a construction site and perform tasks with a high degree of accuracy and precision. By using robots for certain tasks, construction companies can reduce the need for human labor, while also improving the speed and quality of the work being done. However, there are still challenges to be overcome in terms of programming and deploying these robots, as well as ensuring that they can work safely alongside human workers. Despite these challenges, the use of robotics in construction is expected to continue to grow in the coming years, as the industry looks for ways to increase productivity and stay competitive.
![[Translate to English:]](https://assets.w3.tue.nl/w/fileadmin/_processed_/8/1/csm_5_theme_robots_in_construction_839426d3b2.jpg "[Translate to English:]")
INDUSTRIALIZED RENOVATIONS: TOWARDS MASS-CUSTOMIZATION IN THE CONSTRUCTION INDUSTRY
Wouter van Groesen
In order to renovate a large number of energy inefficient row houses by 2050 in accordance with the Paris Climate Agreement, the capacity of renovation value chains needs to be significantly increased and the costs of renovations need to be reduced. Simulation of current renovation activities indicated that an average of 684-950 assembly teams are required to achieve these goals, but due to internal and external constraints in current processes, this is unlikely to be achieved. Therefore, it is necessary to adopt mass customization and industrialization principles in strategies and operations.
This involves acquiring and sharing housing stock data to form clusters of homogenous demand, capturing demand through custom standard concepts on a digital platform, establishing fixed collaborations with make to order partners and a hub-and-spoke logistical system, and installing 552 rapid assembly teams. To facilitate this transition, a strategy and operations navigator can be used to structure business case development and generate transition plans. However, the successful implementation of these plans requires the commitment of all stakeholders to establish favorable pre-conditions for the execution of industrial business cases. If these prerequisites are met, capacity will increase and costs will decrease as a result of highly industrialized processes.
SMART MOBILE FACTORIES
Pieter Pauwels, Daniel Hall (Principal Lead) and SNSF-South Tyrol (Project Funding)
The research project aims to develop a prototype for a Smart Mobile Factory (SMF) to supply the construction of infrastructure projects, such as roads, railways, and tunnels, in a more sustainable and economical way. An SMF is a moveable, distributed production facility that is composed of reconfigurable and mobile production systems that can adjust to on-site conditions. It is also digitally represented, enabling advanced planning, simulation, and on-demand production. The main benefits of an SMF include reduced costs and delivery times, reduced environmental impact, and visualization and control of the production environment.
The research will be conducted in collaboration with EuroTube Foundation, a research institute focused on sustainable ultra-high-speed vacuum ground transportation, or "hyperloop," and will involve the concept and design of the SMF, digitization of the factory, and development of sustainability requirements. The prototype will be tested and validated through a case study of the production of concrete elements for the hyperloop test track.

ROBOTIC CONSTRUCTION OF COMPONENTORIENTED PREFABRICATED ELEMENTS
Aiyu Zhu
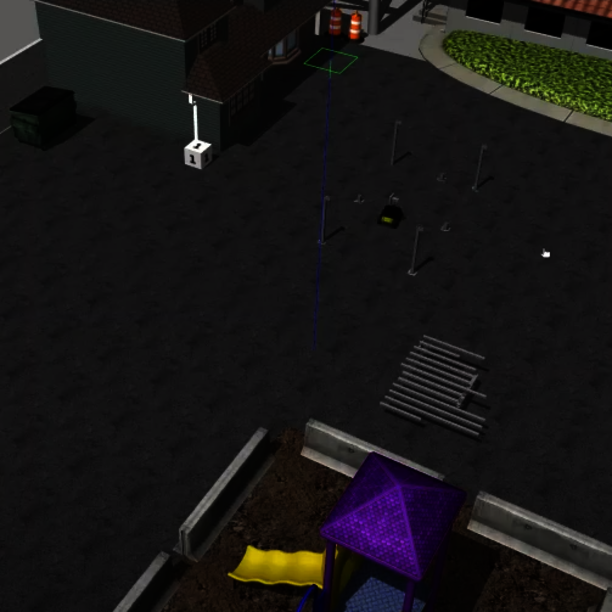
Robots are increasingly being used in construction for specific tasks, but they are not yet able to work together to complete multiple tasks. There is a need to study how to coordinate robots in prefabricated construction. We propose a component-oriented robot construction approach that assigns state and requirements to components, which drives multiple robots to assemble prefabricated housing. We implemented multiple different robots in a prototype BIM simulation environment to complete the construction of a steel frame based on these components.
In order to more accurately simulate robot-based construction, the next step is to introduce more complicated BIM models and more accurate robot models to enable the collaborative simulation of a wider range of prefabricated construction processes. Despite many advances, it is still difficult to achieve an entirely autonomous construction process using robots, both in terms of transport and manipulation functions. One significant challenge is the lack of reliable control and coordination methods for construction robots during the construction process. There is a gap between the planning of multiple coordinated robots (MRC) and construction management. We believe that bridging this gap will lead to a more automated construction site, where multiple coordinated robots work together to complete their tasks.