PRECEYES
Description
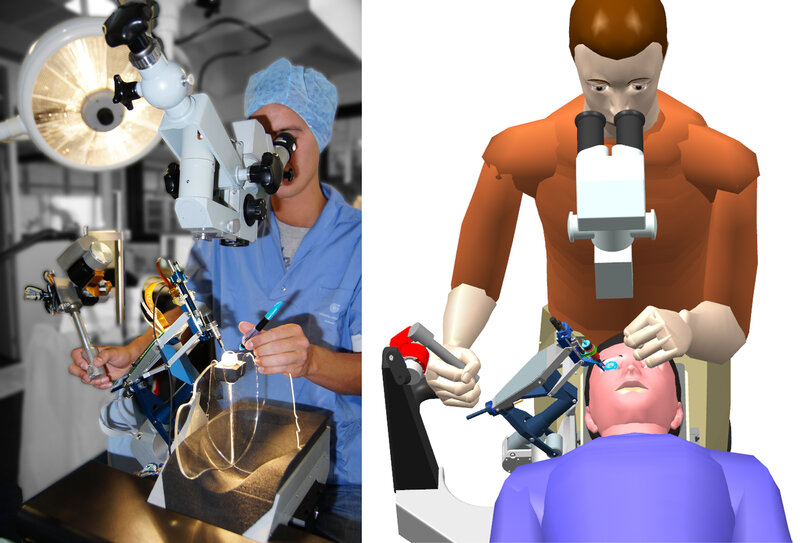
Vitreo-retinal eye surgery encompasses the surgical procedures performed on the vitreous humour and the retina. It is performed minimal invasively with 0.5mm needle shaped instruments, which are manipulated by hand in four degrees of freedom about the insertion point to the eye. While performing vitreo-retinal surgery manually, the surgeon faces various challenges. Typically, delicate micrometer range thick tissue is operated, for which steady hand movements and high precision instrument manipulation are required.
Robotically assisted surgery with a master-slave system can assist the surgeon in these which are faced during VR-surgery. The slave system performs the actual surgery, by means of instrument manipulators which handle the instruments. The surgeon remains in control of the instruments by operating haptic interfaces via a master. Using electronic hardware and control software, the master and slave are connected. Amongst others, advantages as tremor filtering, up-scaled force feedback, down-scaled motions and stabilized instrument positioning will enhance dexterity on surgical tasks. Furthermore, providing the surgeon an ergonomic body posture will prolong the surgeon’s career.
The master-slave system features a compact, lightweight, easy to setup design and is equipped to perform a complete intervention. For bimanual instrument operation, two haptic interfaces and two instrument manipulators are used. An instrument manipulator allows the same degrees of freedom and a similar reach as manually performed surgery. Surgical forces are measured to supply force feedback to the surgeon via haptic interfaces. Both the haptic interfaces as the instrument manipulator is designed for high stiffness, is play free and has low friction to allow tissue manipulation with high precision (<10µm). Each instrument manipulator is equipped with an on board instrument change system, by which instruments can be changed in a fast and secure way.

Aditional information
- Start date:
- 01-04-2006
- End date:
- 01-10-2011
- From 01-10-2011 continued by PRECEYES Medical Robotics
- Involved TU/e employees:
- Involved external partners:
- Keywords:
- Robotic surgery
- Vitreoretinal
- Eye surgery
- Retina
- Vitreous humour
- Eyerhas
- PRECEYES
- Haptics