Researcher in the Spotlight: Margot Neggers
...how robots perceive and understand the intentions of humans...
I’m Margot Neggers and I’m part of the Human-Technology Interaction research group of the Department of Industrial Engineering & Innovation Sciences. I’m researching how humans and robots (e.g. autonomous guided vehicles) can understand each other better. This means investigating how robots perceive and understand the intentions of humans as well as how humans perceive and understand those of robots. It includes research on human-aware navigation in environments that robots share with humans and the conveying of behavioral and directional intentions from the robot’s perspective.
influencing and perceiving
A lot of autonomous guided vehicles do not yet take humans into account because it’s challenging to recognize a human and their state. Furthermore, humans are very unpredictable and dynamic, with a tendency to interact with and interpret their environment. It’s my challenge and goal to bridge this gap by gaining a better understanding of how robots’ behavior influences human perceptions and reactions. My research is therefore interesting for companies that produce autonomous guided vehicles that operate in environments in which humans are present – but also for companies that produce other autonomous robots that interact with humans, like service or care robots.
Measuring discomfort
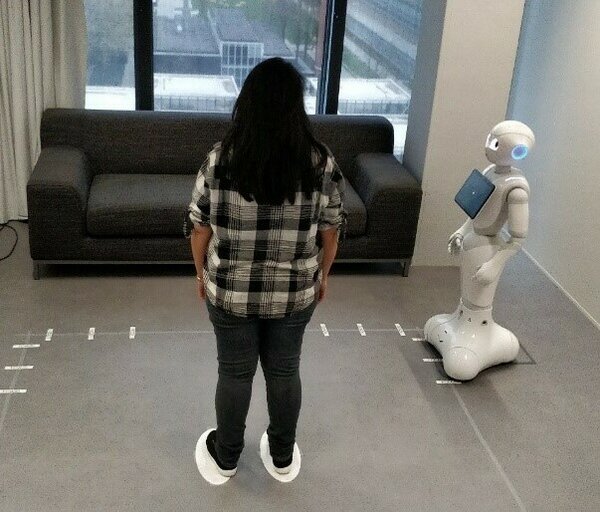
To include humans in my research, I design experiments in which I test the effects of different robot behaviors on human participants in our social robotics lab. This involves programming the robot and inviting participants to our lab to interact with it. In the accompanying picture, you can see a participant being passed by a robot in order to determine a comfortable passing distance.
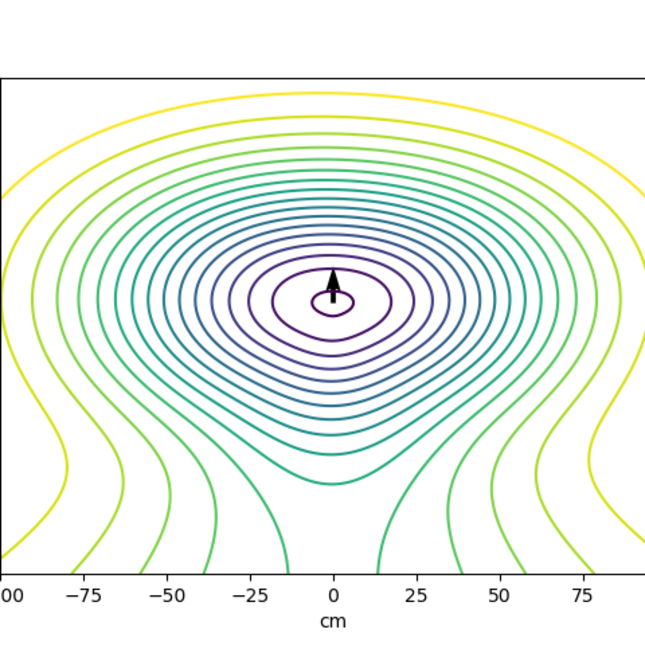
I started by investigating an acceptable distance when a robot passes a human in a corridor. The results showed that comfort increased with larger passing distances and that clearances (end-to-end distances) of about 40 cm were deemed acceptable. Passing on the left compared to the right of the human had no effect on comfort. Next, I investigated the size and shape of personal space when a robot passes a static human from all directions (front, back, left and right). The results are shown in the figure below, with the arrow in the middle representing a human who is oriented towards the top of the graph. What is interesting is that passing behind the human is perceived as very uncomfortable. These results can be used to create human-aware navigation algorithms.
Striving for acceptance
My research is matched with three researchers within the Departments of Mechanical Engineering and Electrical Engineering. They focus on the localization, mapping and reasoning of the robot and the creation of world models. Whereas they deal with the technological development of autonomous guided vehicles, I focus more on the psychological effect on humans. Hopefully, my research will result in robots being able to behave in a socially acceptable way around humans. This increases the chances that humans will accept robots in their environments.