Robotics is a master’s track in the Mechanical Engineering Master’s Program. This means that you apply for the Master’s Program in Mechanical Engineering (CROHO: 60439) and specialize in Robotics. This master’s track offers a two-year program (120 ECTS), with the first year revolving around courses. The second year is dedicated to the internship (15 ECTS) and graduation project (45 ECTS). After completing the program, you receive a Master’s diploma in Mechanical Engineering stating your specialization in Robotics.
Year 1 | Core program | 20 ECTS |
| Specialization courses | 20 ECTS |
| Free electives | 15 ECTS |
Professional skills | 5 ECTS | |
Year 2 | Internship | 15 ECTS |
| Graduation project | 45 ECTS |
Year 1
The first-year course program comprises a selection of four core courses (20 ECTS), training you as a future Robotics graduate in the basics of mechanical engineering. You choose four core courses (20 ECTS) from the list below:
- Control Engineering
- Multibody and Nonlinear Dynamics
- Experimentation for Mechanical Engineering
- Engineering Optimization
- Scientific Computing for Mechanical Engineering
- Applications of Design Principles
By selecting four specialization courses (20 ECTS), the Robotics Master’s track trains you to become a disciplinary expert. The Robotics specialization courses include:
- System Theory for Control
- Optimal Control and Reinforcement Learning
- Nonlinear Control
- Supervisory Control of Cyber-Physical systems
- Physical and Data-Driven Modeling
- Modeling and Control of Manufacturing Systems
- Analysis and Design of Networked Dynamical Systems
- Hybrid Systems and Control
Your technical course program is complemented by 15 ECTS of free electives. These free electives enable you to customize your program to your specific interests by following courses in related disciplines or even in other TU/e departments. Some examples of possible electives are:
- Mobile Robot Control
- Computer Vision and 3D Image Processing
- Convolutional Neural Networks for Computer Vision
- Machine Learning for Systems and Control
- Advanced Sensing using Deep Learning
- Human-Robot Interaction
- Haptics - Perception and Technology
- Advanced Materials for Soft Robotics
As part of the first-year course program, you also follow professional skills courses (5 ECTS), focused on career development, teamwork, academic writing and more.
Year 2
The second year is all about learning how to apply the disciplinary knowledge and skills acquired through your course program. In your internship (15 ECTS) you apply your know-how in an industry project or at a research institute. Being an ambassador of the Robotics Master’s track, you gain an impression of your professional future. After your internship, you work on your graduation project (45 ECTS). This Robotics graduation project revolves around academic research, allowing you to specialize in the Robotics aspects of your liking.
Graduation project
In your graduation project you apply the know-how and skills acquired through your course program and internship project to an academic research project. Research topics can focus on detailed aspects of Robotics - for example robotics manipulation and motion or machine learning. They can also require you to apply your Robotics knowledge and skills, for example in the context of a design question. Your graduation project comprises two phases. In the first phase of the project, together with your Robotics project supervisor, you detail your research questions and methodology. In the second phase, you perform your research under the supervision of a Robotics researcher. This second phase will result in a master’s thesis. You defend your thesis before a panel of experts and present your findings in public.
Examples of recent Robotics graduation projects are:
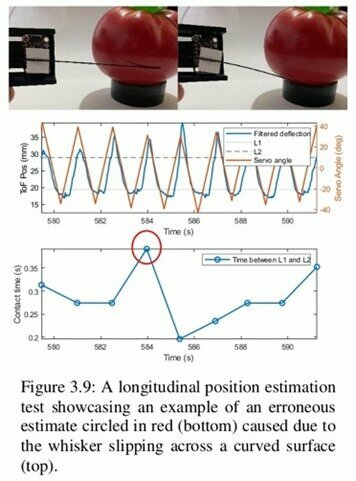
Contact sensing and localization with active artificial whiskers
An actively controlled "whisker" is developed to make extremely soft, controlled contacts with fragile objects like tomatoes, in the context of more intelligent agri-food robotics. The sensor measures deflections of the whisker using a Time-of-Flight distance sensor at a fixed point away from its base. Combined with a 1D controlled motion of the base of the whisker, this results in an active sensing tool to be integrated in the "gripper" of a robot working in a greenhouse.
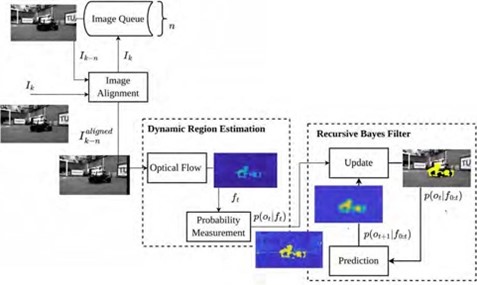
Detection and tracking of dynamic image regions on a moving camera
Safe navigation in dynamic environments requires autonomous robots to perceive moving objects around them. In this work, we develop a new robot perception algorithm to detect dynamic regions on a moving camera using optical flow, image alignment, and Bayes filtering. The proposed algorithm is tested using a camera mounted on a mobile robot in an indoor environment with different dynamic moving objects.
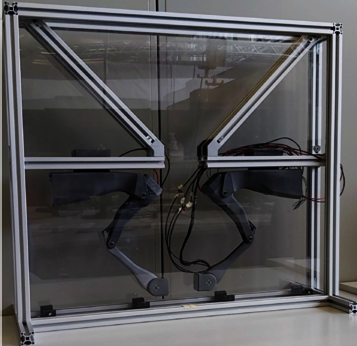
Design of a dual-arm 6DOF robotic system for impact-aware manipulation
In this project, a robotic system is designed and built based on numerical simulations involving multibody simulations with contact and friction and advanced control methods. The setup is composed of quasi-direct drive backdrivable actuators and used to support research and education on advanced dynamic manipulation.
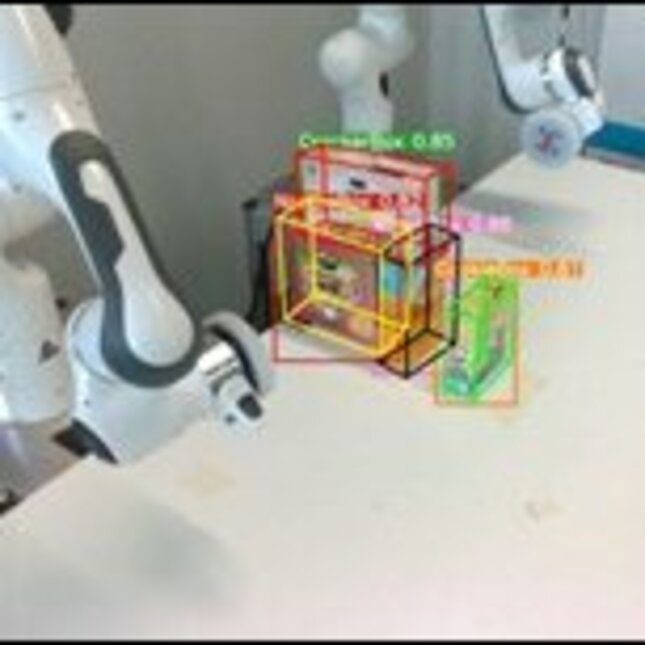
Vision-based robotic perception and physics-informed scene representation for assembly and manipulation
In this project, a physics engine is initialized via 6D pose information from objects seen by an RGB camera and robot encoders to create a virtual representation of the world surrounding the robot that allows for long-term planning and reasoning.
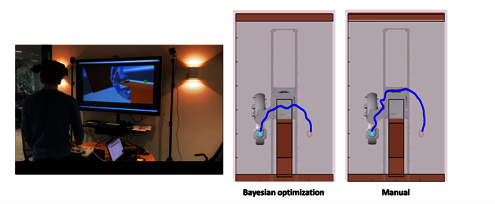
Bayesian optimization-based parameter tuning of model predictive controllers for shared control and autonomous motion of medical imaging robots.
The project applies Bayesian Optimization to optimize controllers for autonomous motion and shared control of a medical robot. Results show a significant performance improvement compared to manually tuned controllers.
The Mechanical Engineering pre-Master’s program
The Mechanical Engineering (ME) pre-Master’s program is intended for students who have not been granted direct admission to the Robotics Master’s track. These students include:
- Bachelor graduates from TU/e programs (or other Dutch universities) who did not obtain a bachelor’s in Mechanical Engineering or equivalent
- Graduates from University of Applied Sciences (HBO) Mechanical Engineering programs or equivalent
The ME pre-Master’s typically takes one semester and is worth 30 ECTS. You acquire the necessary background to enable a seamless and successful transition into the Robotics Master’s track. Included in this ME pre-Master’s are courses in calculus, dynamics and control, and robotics. For further information please consult the Education Guide*.
*Note: current students use the Education Guide as a source of information. It contains detailed, practical information that is important during your study program. Prospective students can consult the Education Guide for additional information.