Robotics is een mastertrack in de masteropleiding Mechanical Engineering. Dit betekent dat je je aanmeldt voor de Masteropleiding Mechanical Engineering (CROHO: 60439) en je specialiseert in Robotics. Deze mastertrack biedt een tweejarig programma (120 ECTS), waarbij je in het eerste jaar alleen vakken volgt. In het tweede jaar loop je stage (15 ECTS) en voer je je afstudeerproject uit (45 ECTS). Na afronding van de opleiding krijg je het Masterdiploma Mechanical Engineering met vermelding van je specialisatie in Robotics.
Jaar 1 | Kernprogramma | 20 ECTS |
| Specialisatievakken | 20 ECTS |
| Vrije keuzevakken | 15 ECTS |
Professionele vaardigheidsvakken | 5 ECTS | |
Jaar 2 | Stage | 15 ECTS |
| Afstudeerproject | 45 ECTS |
Jaar 1
Het opleidingsprogramma in het eerste jaar bestaat uit een selectie van vier kernvakken (20 ECTS), met als doel je de basisprincipes van mechanical engineering bij te brengen die je nodig hebt als toekomstig Robotics-ingenieur. Je kiest vier kernvakken (20 ECTS) uit de onderstaande lijst:
- Control Engineering
- Multibody and Nonlinear Dynamics
- Experimentation for Mechanical Engineering
- Engineering Optimization
- Scientific Computing for Mechanical Engineering
- Applications of Design Principles
Door vier specialisatievakken (20 ECTS) te kiezen, word je via de Mastertrack Robotics opgeleid tot een interdisciplinaire experts. De specialisatievakken bij Robotics bestaan uit:
- System Theory for Control
- Optimal Control and Reinforcement Learning
- Nonlinear Control
- Supervisory Control of Cyber-Physical systems
- Physical and Data-Driven Modeling
- Modeling and Control of Manufacturing Systems
- Analysis and Design of Networked Dynamical Systems
- Hybrid Systems and Control
Daarnaast vul je je technische vakkenpakket aan met vrije keuzevakken (15 ECTS). Met deze vrije keuzevakken stem je de opleiding af op jouw specifieke interesses door vakken te volgen in verwante vakgebieden of zelfs bij andere TU/e-faculteiten. Mogelijke vrije keuzevakken zijn:
- Mobile Robot Control
- Computer Vision and 3D Image Processing
- Convolutional Neural Networks for Computer Vision
- Machine Learning for Systems and Control
- Advanced Sensing using Deep Learning
- Human-Robot Interaction
- Haptics - Perception and Technology
- Advanced Materials for Soft Robotics
Als onderdeel van het opleidingsprogramma in het eerste jaar volg je ook professionele vaardigheidstrainingen (5 ECTS) die zijn gericht op loopbaanontwikkeling, teamwork, academisch schrijven en meer.
Jaar 2
Het tweede jaar staat in het teken van het leren toepassen van de vakinhoudelijke kennis en vaardigheden die je tijdens je opleiding hebt opgedaan. Tijdens je stage (15 ECTS) pas je de kennis toe in een project in de sector of bij een onderzoeksinstituut. Als ambassadeur van de Mastertrack Robotics krijg je een voorproefje van je professionele toekomst. Na je stage ga je je bezighouden met je afstudeerproject (45 ECTS). Academisch onderzoek staat bij het Robotics-afstudeerproject centraal en dit geeft je de ruimte om je te specialiseren in de robotica-onderdelen van jouw voorkeur.
Afstudeerproject
In je afstudeerproject pas je de kennis en vaardigheden die je hebt opgedaan tijdens je opleiding en stage toe op een academisch onderzoeksproject. Onderzoeksthema’s kunnen dieper ingaan op gedetailleerde aspecten van robotica, bijvoorbeeld robotmanipulatie en -beweging of machine learning. Je kunt jouw knowhow op het gebied van Robotica ook aanwenden voor bijvoorbeeld een ontwerpvraagstuk. Je afstudeerproject bestaat uit twee fasen. In de eerste fase van het project werk je samen met je Robotics-projectbegeleider je onderzoeksvragen en methodologie uit. In de tweede fase voer je onder begeleiding van een Robotics-onderzoeker je onderzoek uit. Deze tweede fase resulteert in een masterscriptie. Je verdedigt je scriptie voor een panel van deskundigen en presenteert je bevindingen in het openbaar.
Voorbeelden van Robotics-afstudeerprojecten
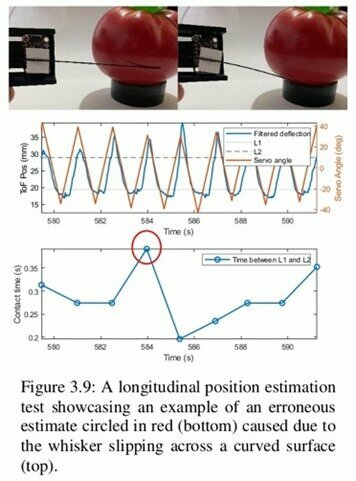
Contactwaarneming en lokalisatie met actieve kunstmatige voelsprieten:
In het kader van intelligentere robotica in de agrocultuur, is er een actief gestuurde ‘voelspriet’ ontwikkeld om op een zachte en gecontroleerde manier contact te maken met kwetsbare objecten zoals tomaten. De sensor meet buigingen van de voelspriet met behulp van een Time Of Flight-afstandssensor vanaf een vast punt op enige afstand vanaf de basis. In combinatie met een 1D-gestuurde beweging vanaf de basis van de voelspriet zorgt dit voor een actief sensorsysteem dat kan worden geïntegreerd in de ‘grijper’ van een robot die werkzaam is in een kas.
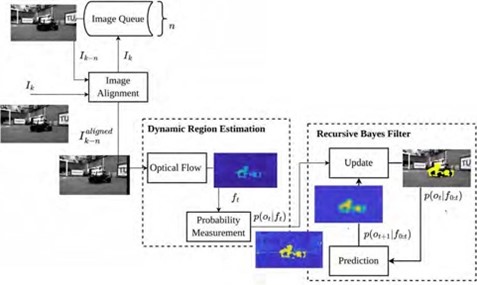
Detectie en tracking van dynamische beeldgebieden op een bewegende camera:
Om veilig te kunnen navigeren in dynamische omgevingen moeten autonome robots bewegende objecten in de directe nabijheid kunnen waarnemen. In dit project ontwikkelen we een nieuw algoritme voor robotwaarneming om dynamische gebieden op een bewegende camera te detecteren met behulp van ‘optical flow’, beelduitlijning en Bayesiaanse filtering. Het voorgestelde algoritme wordt getest met een camera op een mobiele robot in een omgeving binnen met verschillende dynamische bewegende objecten.
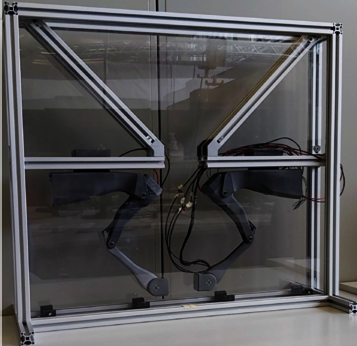
Ontwerp van een dubbelarmig 6DOF robotsysteem voor impact-bewuste manipulatie.
In dit project wordt een robotsysteem ontworpen en gebouwd op basis van numerieke simulaties, waaronder multibody-simulaties met contact en wrijving en geavanceerde regelmethoden. De opstelling bestaat uit quasi-direct drive backdriveable -aandrijvingen en wordt gebruikt ter ondersteuning van onderzoek en onderwijs op het gebied van geavanceerde dynamische manipulatie.
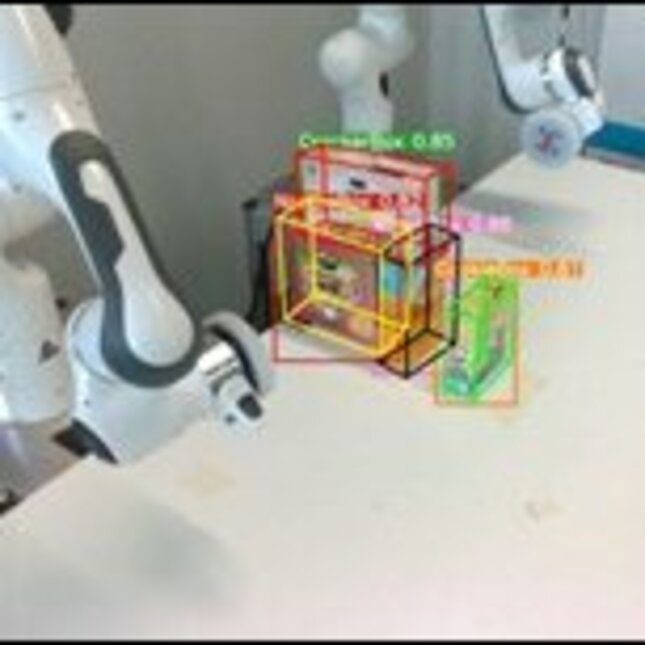
Robotperceptie middels visuele waarneming en scènerepresentatie op basis van natuurkundige principes voor assemblage en manipulatie.
In dit project wordt een fysica-engine geïnitialiseerd door 6D-positie-informatie van objecten die wordt waargenomen door een RGB-camera en robotencoders, om een virtuele representatie van de wereld rondom de robot te creëren, waardoor langetermijnplanning en redenering mogelijk zijn.
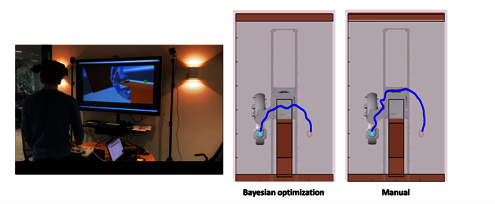
Afstemming van parameters op basis van Bayesiaanse optimalisatie ten behoeve van modelvoorspellende regelaars voor gedeelde besturing en autonome beweging van robots voor medische beeldvorming.
Het project past Bayesiaanse optimalisatie toe om regelaars voor autonome beweging en gedeelde besturing van een medische robot te optimaliseren. De resultaten laten een aanzienlijke prestatieverbetering zien in vergelijking met handmatig afgestemde regelaars.
De pre-masteropleiding Mechanical Engineering
De pre-masteropleiding Mechanical Engineering (ME) is bedoeld voor studenten die niet rechtstreeks worden toegelaten tot de Mastertrack Robotics. Deze studenten zijn onder andere:
- Afgestudeerde bachelorstudenten van TU/e opleidingen (of andere Nederlandse universiteiten) die geen bachelorgraad in Mechanical Engineering (Werktuigbouwkunde) of gelijkwaardig hebben behaald
- Afgestudeerden van een HBO-opleiding Werktuigbouwkunde of gelijkwaardig
De pre-master ME duurt doorgaans één semester en er staan 30 ECTS voor. Je ontwikkelt hiermee de noodzakelijke basis voor een naadloze en succesvolle overgang naar de Mastertrack Robotics. In deze pre-Master ME zijn vakken in calculus, dynamica en besturing, en robotica opgenomen. Voor meer informatie verwijzen we je naar de Studiegids*.
*De Studiegids wordt als informatiebron gebruikt door zittende studenten. Er staat gedetailleerde, praktische informatie in die van belang is gedurende de opleiding. Aankomende studenten kunnen deze raadplegen voor extra informatie.