PITON
Description
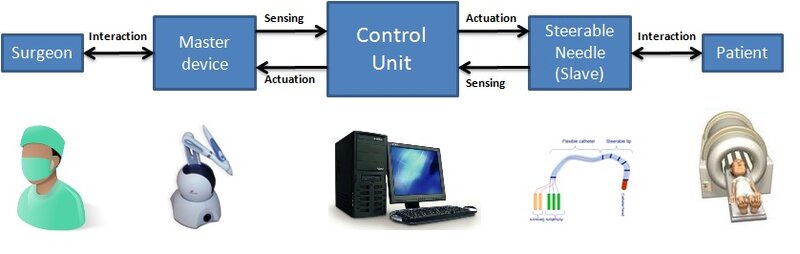
Minimally invasive interventional techniques reduce the costs of the health care system. In that field, insertion of needles in tissue is used to take biopsies or to deliver therapy. In many cases, such a process has to be done with precision of the order of millimetres, which makes necessary the use of Magnetic Resonance Imaging (MRI) scanners in order to provide a guide to the surgeon. Moreover, a steerable needle can help the surgeon to reach the target in a more efficient way, allowing him to make corrections in the trajectory, even avoiding critical parts inside the body, when the needle is already inserted in the tissue. On the other hand, the MRI scanners do not provide much room for the surgeon to do a procedure with the patient and additionally is not convenient for the surgeon to be exposed to the high magnetic fields for long time. Therefore, the PITON project will result in a MRI compatible robotic teleo-perated steerable needle system for percutaneous interventions. A diagram of the system can be seen in the figure below. TU/e’s main task is to do research on how to design control algorithms to achieve a predefined system performance in the environment of operation.
- Start date:
- 01-10-2009
- End date:
- 01-10-2012
- Involved TU/e employees:
- Involved external partners:
- Keywords:
- Steerable Needles
- Bilateral teleoperation
- Haptics
- MRI compatibility